
- Product Name
-
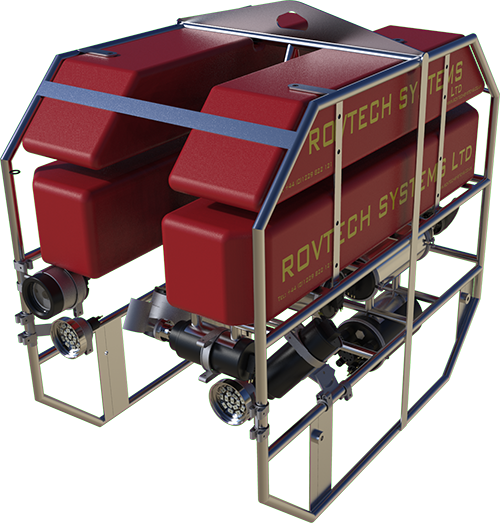
Adaptable Seaker
- Summary
-
The Adaptable Seaker is a versatile and reliable ROV designed for a range of tasks, including decommissioning in the nuclear industry. Its extra power cores enable the attachment of various tooling skids, making it easily customizable for different tasks.
- Description
-
Featuring an open frame structure made of Stainless Steel 316L, the Adaptable Seaker ensures durability and ease of maintenance. The propulsion system consists of four interchangeable thrusters, and up to three cameras can be fitted to the vehicle. A radiation probe is also included to provide radiological readings during operations.
This is the name of the product.
